

故事
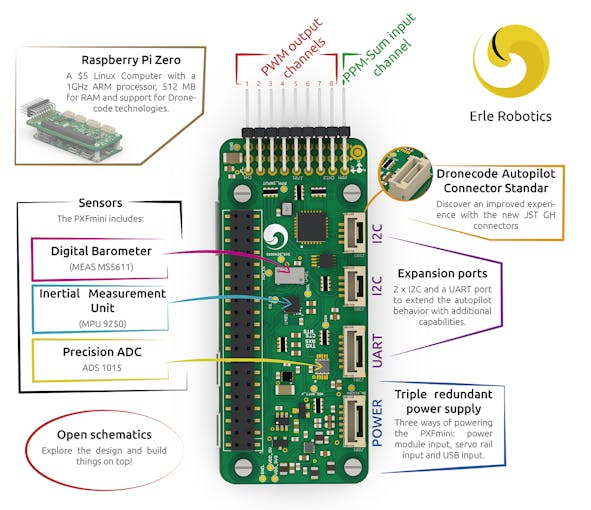
本教程演示了如何使用小于200美元的BOM(物料清单)与Raspberry Pi Zero构建Linux无人机。该无人驾驶飞机使用实时功能的Linux内核,基于Debian的文件系统和为PXFmini 自动驾驶仪板编译的Dronecode的APM飞行堆栈。所有这些组件都被Erle Robotics放在PXFmini 的操作系统映像中。

第1步:组装无人机套件
一旦你得到所有的组件开始组装你的无人机:
- 把机架放在一起,把电机放在上面。
- 使用一些扎带将ESC(电子调速器)固定到框架上并将它们连接到电机上。
- 将ESC 的电源(红色)和接地(黑色)两端放在单独的电缆中(稍后连接到电池上),然后将一切都固定在机架下面。
- 调整电源模块连接器到电池模块。有几种方法可以做到这一点,但这里有一个快速的方法:a)切断接头并将电池和电源模块焊接在一起(一次一个,小心小心!)。
- b)切断电源模块的另一端,然后将电池连接器(先前已切断)重新固定在那里。
- 将“电池+电源模块”包装放在下面,使用包装中的魔术贴来固定.
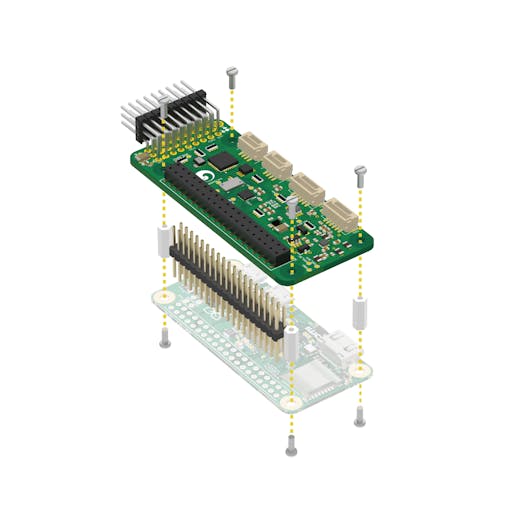
第2步:准备好自动驾驶仪
连接Raspberry Pi Zero顶部的PXFmini拓展板,如以下内容所述:
到这里基本上已经完成了,但你仍然需要在Raspberry Pi Zero + PXFmini集合上找到正确的软件。这应该包括飞行堆栈,适当的内核,在启动时自动启动的启用守护进程,以及其他好玩儿的东西…
幸运的是,如果您从Erle Robotics 购买了PXFmini,您将可以访问他们的Debian映像,其中包括所有这些,只需获取与PXFmini兼容的Debian映像并将其闪存到microSD卡即可。
第3步:安装自动飞控
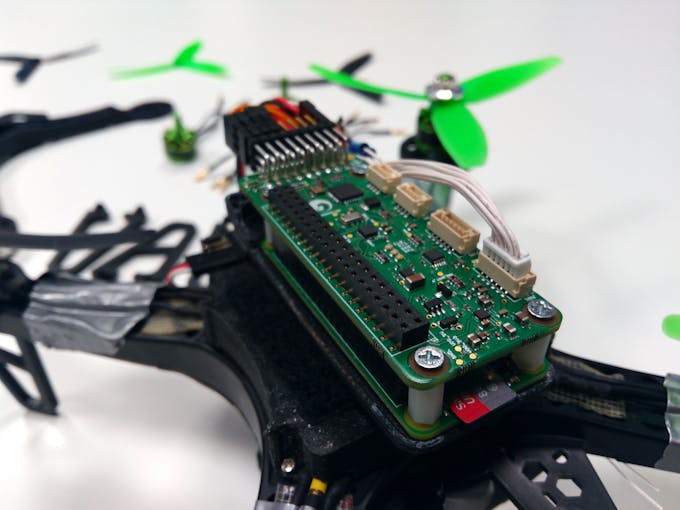
在无人机中安装自动飞控(Raspberry Pi Zero + PXFmini)可以使用多种方法完成。选择您的电源模块,并将JST GH电缆连接到PXFmini。当电池连接时,这将给自动驾驶仪供电。
接下来是在自动飞控中安装PWM通道。取出ESC电缆,将ESC 1(对应电机1)连接到PWM通道1,ESC 2到PWM 2等。

第4步:安装螺旋桨, 爽飞~
有两种顺时针(标有“R”)和逆时针的螺旋桨。将顺时针螺旋桨放在电机3和4中,逆时针螺旋桨放在电机1和2中。
最后,你需要一种方法来控制你的无人机。我提出两种方法:
- WiFi +游戏手柄:让自动飞控使用USB加密狗创建自己的WiFi网络(Erle Robotics图像默认支持此功能),并使用通用的游戏路径通过地面控制站控制无人机。
- WiFi + ROS :您是否了解机器人操作系统(ROS)?您可以使用ROS节点来显示飞行模式,状态并控制无人机。
- 传统的RC :或者你也可以购买带有PPMSUM接收器的RC控制器,并将其连接到自动飞控(到PPM-SUM输入通道),这个方法是比较常见的,就是你要买一个支持 ppm 信号的接收机和支持 ppm 信号的遥控器.
另外, 注意,切记不要去人多拥挤的地方飞行, 不要去机场,高压线密集的区域飞行, 尽量选择空旷无人的,没有安全隐患的地方飞行,因为这不是普通的玩具,是航模, 要注意安全!






