前言
原创文章,转载引用务必注明链接,水平有限,如有疏漏,欢迎指正。
本文使用Markdown写成,为获得更好的阅读体验和正常的链接、图片显示,请访问我的博客原文:
http://www.cnblogs.com/sjqlwy/p/zero_fpv.html
虽然可以买到商品成品,且会比我们做出来的东西更美观,性能指标更强,但是在折腾中学习,按照自己的需求进行优化改动,享受创造的喜悦,不正是创客精神嘛。
本项目使用手头现有的硬件,旨在将树莓派Zero作为飞控图传使用,本以为会很简单,但是软件适配方面遇到一些问题,困扰了很久。
1. 硬件部分
我们首先来看看硬件列表:
- Raspberry Pi Zero v1.3
- otg table & usb wifi dongle (Xiaomi wifi)
- Raspberry Pi Camera Module v1.3
- LattePanda With LCD Display

1.1 RPi Zero介绍
Zero体积小巧 (可以当钥匙扣),性能足够,兼容树莓派软硬件资源,这几点让它非常适合做一些硬件相关的创意项目。如果把它当做一个小号的树莓派使用,那真是买椟还珠?我们看看它的相关配置:
- 1GHz单核CPU
- 512MB 内存
- Micro-USB OTG 接口(可用于供电)
- Micro-USB 电源接口
- 树莓派 40-pin GPIO引脚
- CSI 摄像头接口 (仅支持 v1.3)
这里我们准备通过GPIO接口供电,OTG接口连接USB无线网卡与胖哒通讯,搭建Web服务器向LattePanda传输视频流。写这篇文章的时候新版的RPi Zero W(ireless)已经发布,增加了蓝牙无线模块,更加方便,但是我没有,而且很难买T_T。
1.2 Zero 供电
“要有电——《创世纪》”
虽然官方仅说明使用Micro USB PWR接口供电,但是使用过程中可以发现OTG接口和GPIO引脚也可以但是不推荐(缺少保护电路)。OTG供电可以参考我之前写的文章《一根数据线玩转树莓派Zero》,不再赘述。因为飞控上不能搞个充电宝弄根数据线,所以准备通过杜邦线连接GPIO接口进行反向供电,这里需要稳定的5v电压,否则可能有损害zero的风险!

如图所示,引脚2接+5v,引脚6接地。
更多讨论与电路原理图等请移步:
当然也可以使用专门的供电拓展模块,比如Pimoroni Zero LiPo:

1.3 RPi Camera Module
Zero仅支持RPi Camera v1.3,彼时zero发布时并没有v2的摄像头模块。关于RPi摄像头模块的详细信息务必阅读eLinux的页面。
v1.3采用OmniVision OV5647摄像头组件,支持500万像素,实测效果还不错,比较清晰。
需要注意的是,RPi和RPi Zero CSI摄像头接口大小是不一样的,v1.3默认只有适用尺寸较大的RPi接口排线,相用在Zero上的话需要额外购买排线。我是在阿里巴巴上购买的,¥7.5供参考,并额外购买了亚克力支架。


1.4 Wireless Communication
因为在室外操作,信号衰减较小,这里我们的方案是otg线+小米随身wifi(采用mt7601u芯片)进行无线传输。使用小米wifi的原因是因为mt7601u功耗很小,稳定性/发热/传输速度距离都可以接受,后期可能会换用模块或者加装天线。

当然也可以选用现成的模块,比如Red Bear IoT pHAT:

2. 软件部分
2.1 Zero操作系统选择
操作系统是相当于开车的司机,为zero选择一个合适、方便的系统如虎添翼。由于项目需要,我们选择headless模式进行操作,不需要图形界面,这里讲两个系统:Raspbian和DietPi。
2.1.1 DietPi
一直以来使用的且十分推崇的树莓派操作系统,有些过相关介绍,很久没更新了,现在又增加了很多新特性。其特色包括性能优化,可以快速方便地自动安装配置各种软件,无痛学习上手树莓派,另外作者的脚本写的很棒,可以学到很多东西。
虽然DietPi支持Zero,但是对OTG 虚拟网卡支持并不好,所以最近一直在尝试进行适配,也遇到了很多问题,卡在这里很久,记录如下。
按照《一根数据线玩转树莓派Zero》的方法,分别更改boot分区下cmdline.txt和config.txt文件,启用usb gadget ether功能,并在/etc/network/interfaces里预增加usb0虚拟网卡相关设置文件。使用MicroUSB连接Host后,正常上电可以识别到LAN连接,但是
- 使用ssh登录zero,即使开启了网络共享zero也无法上网;
- windows可以ping通zero,反向ping则无响应。
以上问题在使用Raspbian Lite时并不存在,经群里枫大的提醒,使用Wireshark软件进行局域网抓包分析和USB2TTL串口模块直接调试的方式寻找分析问题。结果如下:Wireshark可以捕获主机ping zero的ICMP协议包,反向无任何响应。最后尝试关闭Windows防火墙解决,怀疑是Raspbian正常使用,没有测试ping命令,所以默认为无需关闭防火墙,这里绕了很大弯路。
注意,开启网卡混淆模式进行监听数据包时,ping命令会返回(DUP!),提示数据包重复。
此时仍然无法上网,ping www.baidu.com提示unknown host,直接ping IP地址ok,cat /etc/resolv.conf没有发现正确的DNS服务器地址。手动在interfaces文件增加dns-nameservers 114.114.114.114后解决,可以正常联网并更新系统。
注意,插拔zero后可能会无法联网,此时关闭|重新开启主机网卡网络共享稍等即可。
完成以上设置之后,安装Lighttpd网页服务器、php等之后,重启失败,串口无任何输出。如此这般,屡试不爽。长久的沉默与崩溃,遂放弃。经历阅读DietPi脚本源码,完善修改相关设置,查看了很多Gadget相关驱动说明和其他文档资料,都准备向github上提交commit了,然后又回到原点,个中滋味,百般无奈,于是怒打了几把王者荣耀平复心情。。。话说之前玩DOTA的,对王者荣耀这种小学生游戏嗤之以鼻,某日和师弟们玩了下,发现我凑上瘾了—
注意,使用otg时推荐使用Raspbian,在正式环境(GPIO供电+USB无线网卡),DietPi是没问题的。
2.1.2 Raspbian Jessie Lite
平复一下心情之后,我们回到树莓派基金会官方推荐的Raspbian Lite,无图形界面,没有预装各种Bloatware。之前的文章是以此为基础进行演示的,各方面比较完善。安装使用过程中比较顺利,这次没有出什么幺蛾子了,泪目。。。
2.2 RPi Cam Web Interface
Camera 图像传输与控制首先想到的是使用RPi Cam Web Interface来管理Camera和传输图像:
Web based interface for controlling the Raspberry Pi Camera, includes motion detection, time lapse, and image and video recording。控制树莓派摄像头的网页前端,支持motion运动检测、定时拍摄以及图像、视频录制。
- eLinux wiki 介绍:http://elinux.org/RPi-Cam-Web-Interface
- GitHub项目主页:https://github.com/silvanmelchior/RPi_Cam_Web_Interface
- 相关讨论:http://www.raspberrypi.org/forums/viewtopic.php?f=43&t=63276
项目架构如下,主要包括motion——负责运动检测、raspimjpeg——图像捕获与视频流传输、Web Server (Apcahe|Ngnix|Lighttpd)——网页控制界面。受限于zero的性能,以及并不需要多少高级特性,这里Web Server选用更轻量的Lighttpd。

原本执着于DietPi就是因为可以一键安装配置好各种软件,RPi-Cam-Web-Interface也在其中。因为存在问题没解决,所以按照Daniel Knight的脚本手动操作,仍然失败。。。最终在Raspbian上按照官网的方法安装成功。
- 启用RPi Camera:
sudo raspi-config命令 - 正确连接Camera:金手指朝下(LattePanda也是如此)
- 安装RCWI:
# 更新系统并安装git sudo apt update && sudo apt dist-upgrade && sudo apt install git # 下载源码并进行安装 git clone https://github.com/silvanmelchior/RPi_Cam_Web_Interface.git cd RPi_Cam_Web_Interface chmod u+x *.sh sudo ./install.sh
期间会跳出一个命令行对话框:

使用Backspace键删除,无法使用Del。如图所示,则可以通过在浏览器里输入[pi_ip]:80/rcam访问Web Interface,且开机自动运行。这里[pi_ip]填入树莓派的ip地址,我这里是192.168.137.2。
注意:
- 关闭camera上的红色led可以在
/boot/config.txt文件增加disable_camera_led=1 - 只想要最简洁的图像界面可以访问
[pi_ip]/rcam/min.php
Zero 图像传输部分

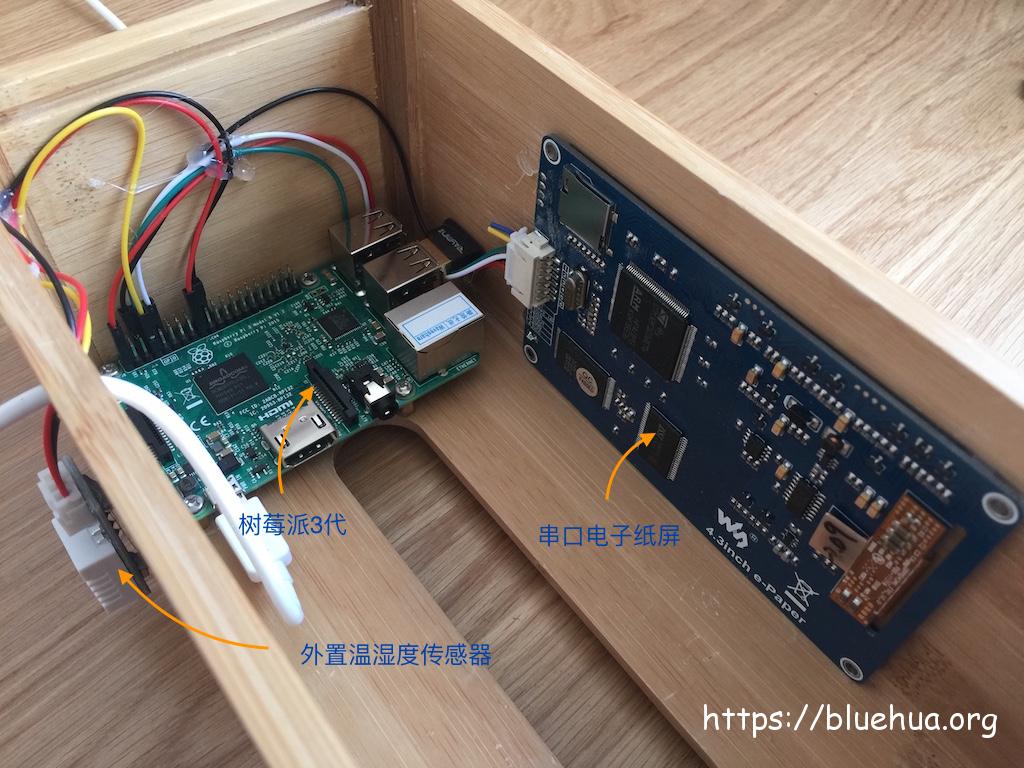
分别是a. OTG线+USB无线网卡(RT3070为例,小米WIFI没找着); b. Zero本体; c. RPi Camera + 排线; d. CH340G TTL转USB模块,可以进行调试同时通过GPIO引脚为树莓派提供5v供电。正式版仅需要两根线为Zero供电即可。
LattePanda 获取Zero实时图像(网页)

帧率和清晰度都相当可以,拍得比较糊,大家凑合着看,看不清的想象一下。只需要在LattePanda里打开网页,地址填[pi_ip/dietpicam]即可。注意在System里设置为Default Steam比MJPEG Steam流畅。
移动设备获取Zero实时图像(网页)

和PC版基本相同,注意似乎同时只支持串流到一个设备。
移动设备获取Zero实时图像(APP)
这里可以使用免费版的IP Cam Viewer Lite(支持Android和iPhone),当然你也可以购买Pro版,不过Lite版足够使用了。ICVL内置支持RPi-Cam-Web-Interface,如图添加摄像头,修改相关参数。


PC软件获取Zero实时图像(待补充)
因为RPi-Cam-Web-Interface支持视频串流,我们可以使用VLC或者自己写软件(比如QT编写的图形界面程序)直接播放视频流,由于遇到一些问题,后面再完善相关内容。
总结
以上通过多种方式获得树莓派Zero传输过来的实时图像,并且清晰度和帧率都相当不错,符合我们的项目预期。在室外可以让树莓派或者LattePanda建立无线热点,提供两者通讯的手段,当然,WiFiDirect也可以,待求证。
进一步阅读
- 模块成品化比较高的Pi Cam by WMAGNER|hackmypi.com
- 给大家讲讲什么是FPV|tieba